RLV12 V2.0 Description
Schematic
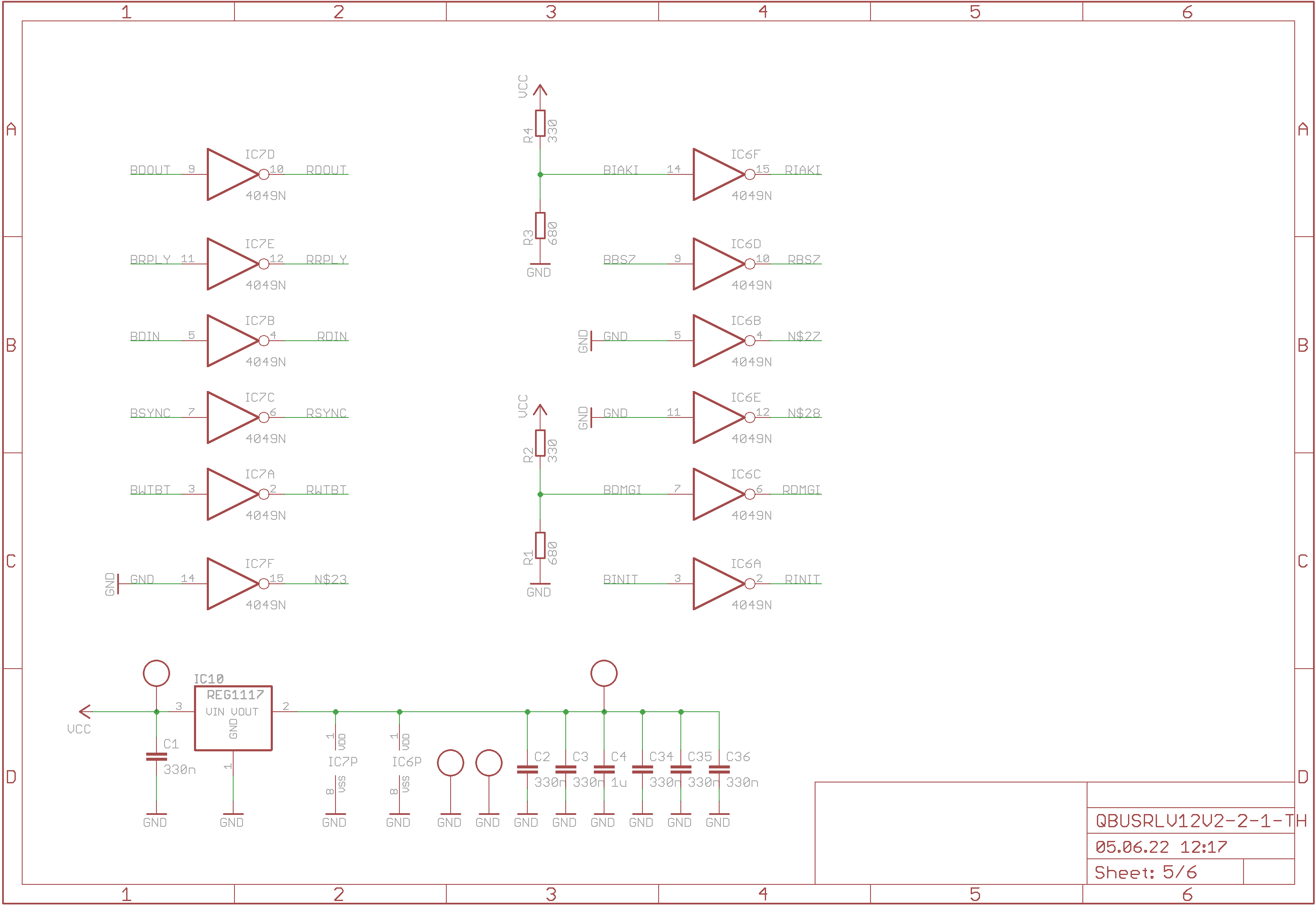
I have started to use the naming convention of digital, so the signals start either with B for Bus, R for Receive and T for Transmit and have an optional L at the end of the name if they are active low.
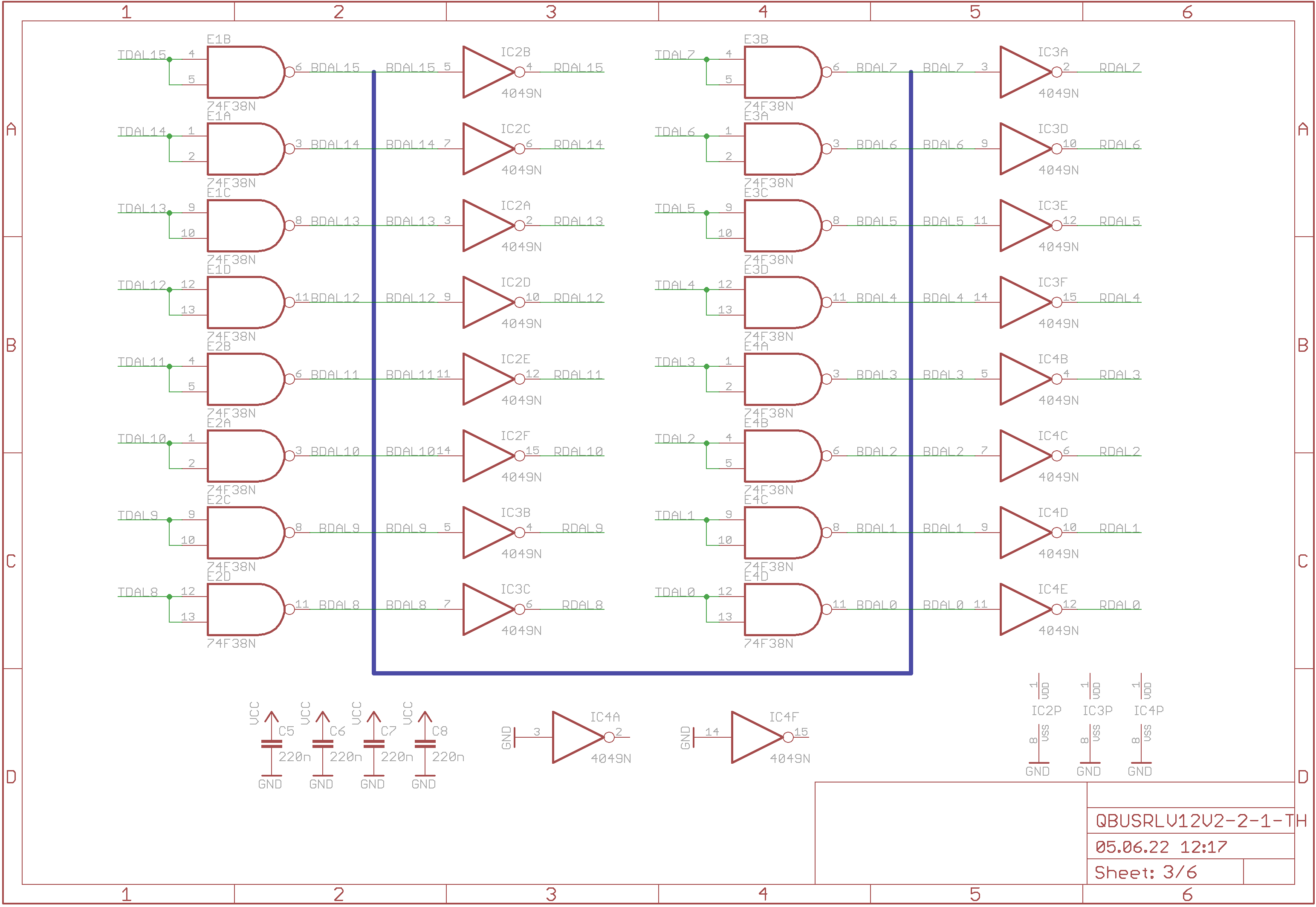
The first pages shows the section with the signals I receive from the Q-Bus. As already mentioned I’m using 74HC4049 and operate them with 3.3V. At this voltage the 74HC4049 have a threshold of approximatively 1.7V, which is the standard for Q-Bus receivers. I use a SMT LDO regulator in a SOT-23 package. I know that I said through hole only ICs but I think a SOT-23 is acceptable.
The next page shows the lower 16 bits of the multiplexed address/data bus. The Q-Bus is bidirectional but as I only use receivers and transmitters and no transceivers, like the DC005, I end with 16 bits receive and 16 bits transmit data signals.
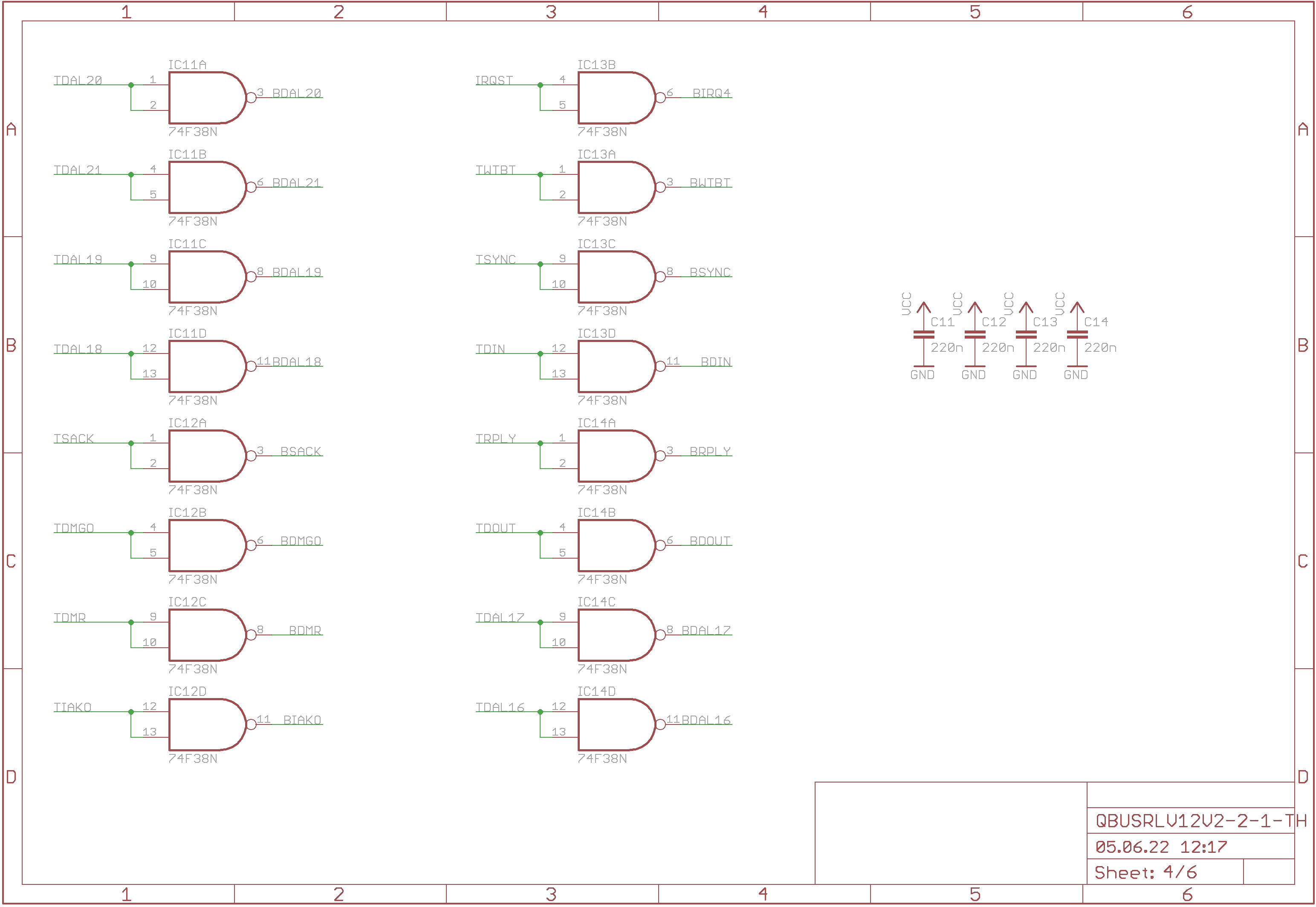
The next section shows the remaining signals I need to transmit to the Q-Bus. For each Q-Bus signal I need to be able to transmit and receive I end up with two signals the emulator has to interface with.
This is the reason I need a lot more PINs on the CPLD. Therefore I added a second
CPLD and divided the functions among the tow CPLDs. At the same time I tried to
avoid that a Q-Bus signal, receive or transmit, is being required by both CPLDs.
The only exceptions are RSYNC and RWTBT. Also only very few signals run
between the CPLDs themselves.
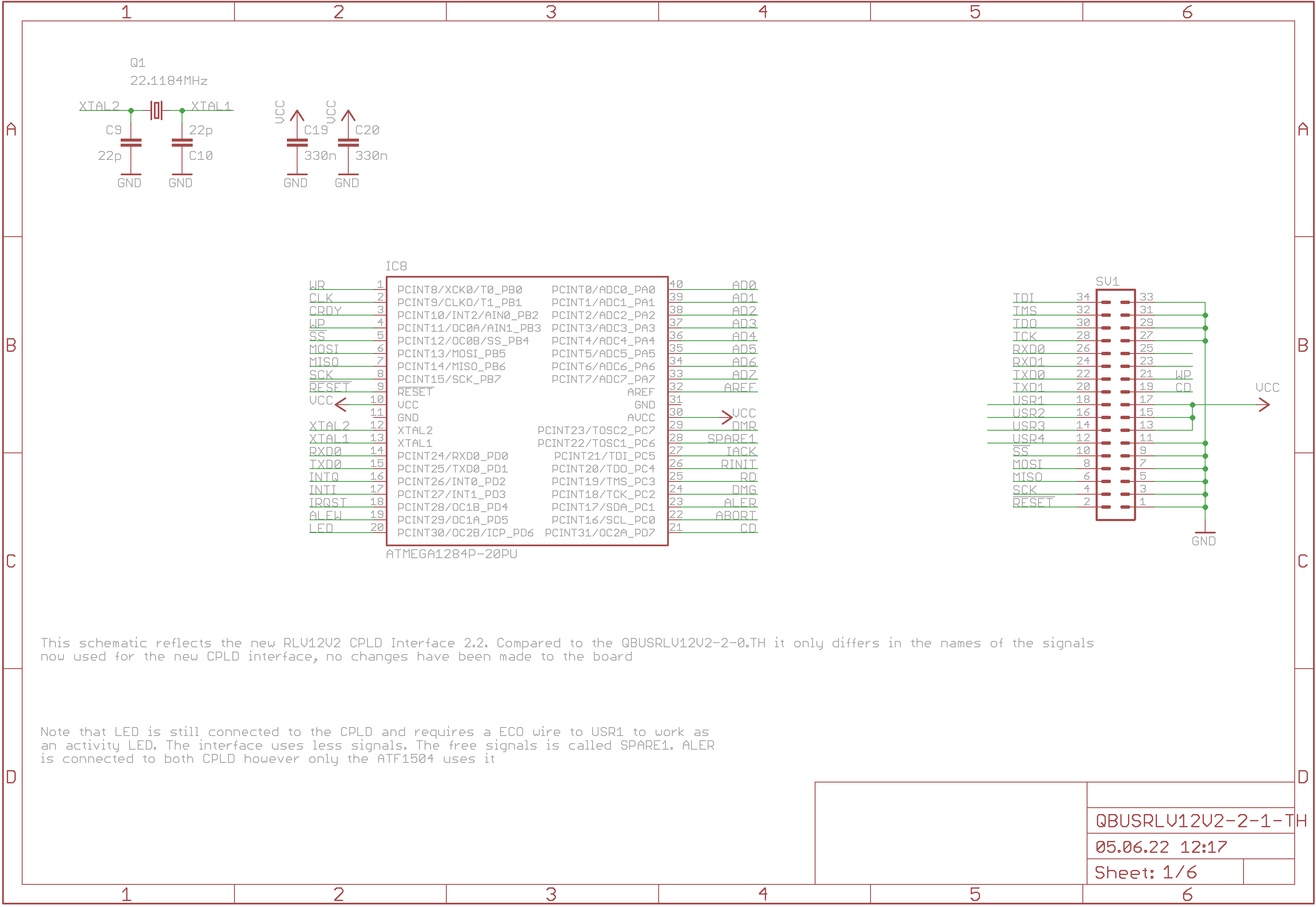
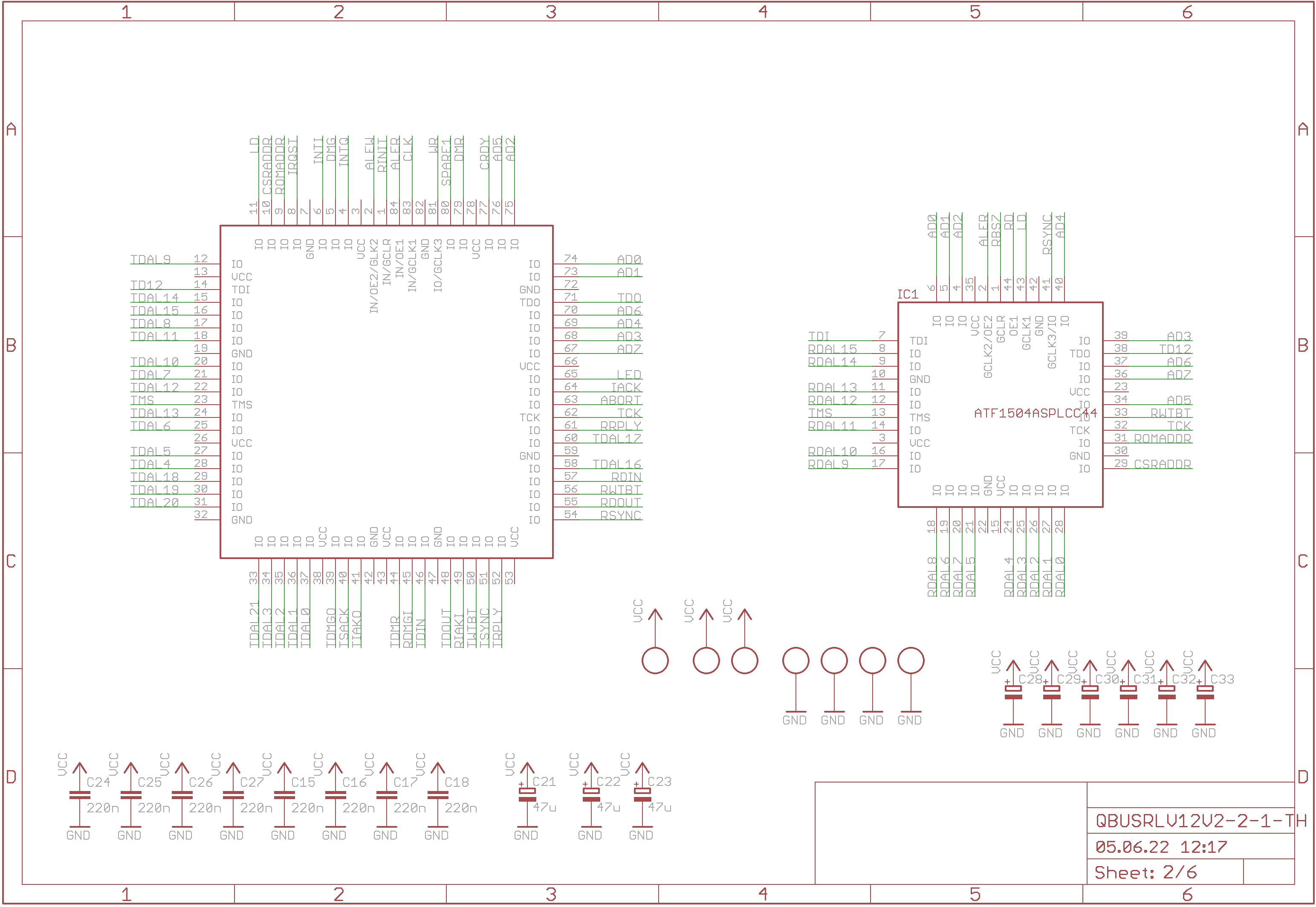
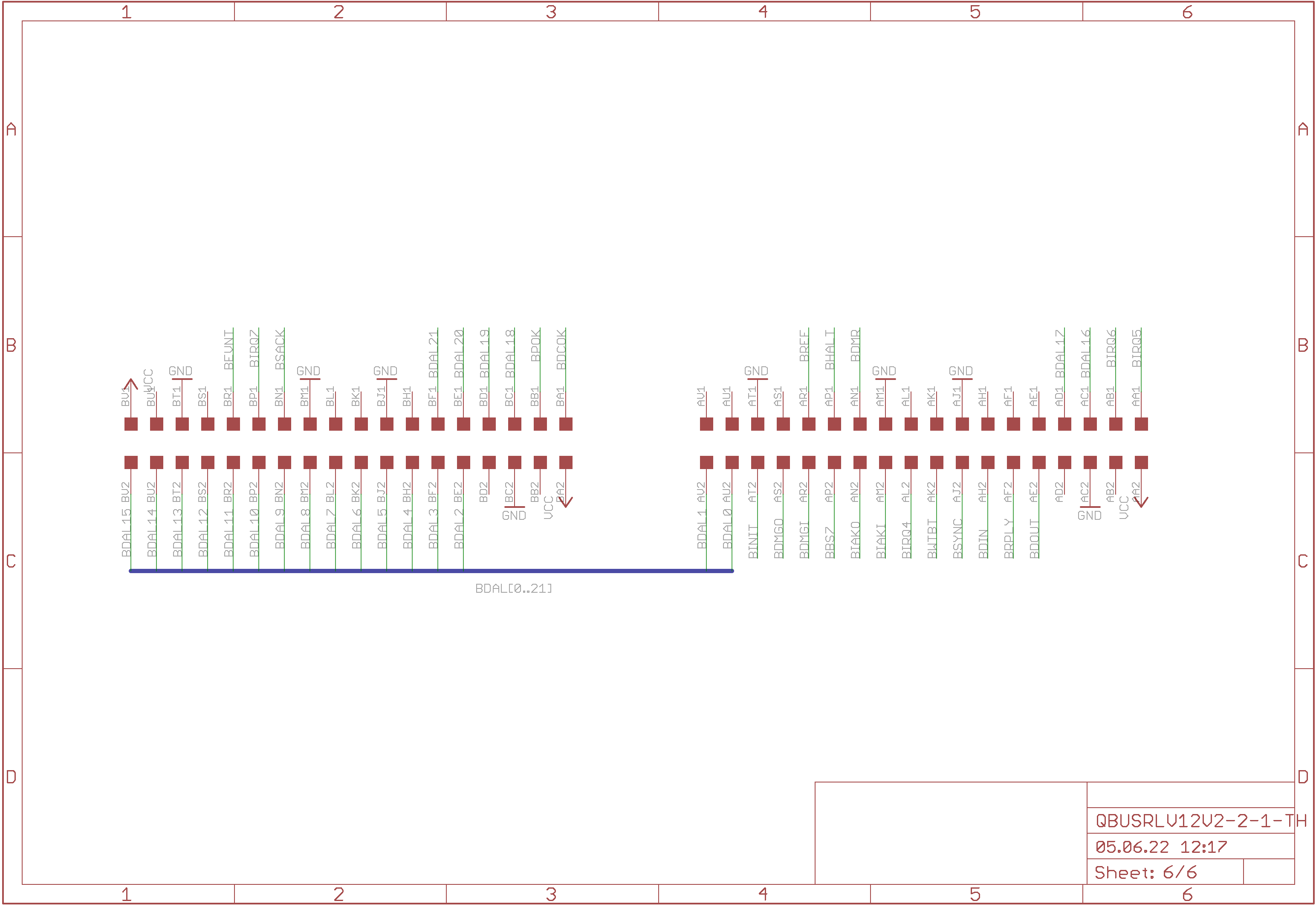
The rest of the schematic is very simple, there is the MCU and the IDC-34 connector for the ribbon cable that runs to the break-out board
and of course the Q-Bus interface
Function Blocks
The RLV12 Emulator consist of the following main functions
- Device register interface, whenever the PDP-11 reads or writes a device register the MCU is informed and processes the data.
- DMA State Machine
- Interrupt Logic for Interrupt Acknowledge Cycles
CPLD Functions
The GLUE logic has now been split into two CPLDs. The main CPLD still implements most of the functions that were used in the single CPLD of the RLV12 Emulator V1.0. To cover for the additional requirements regarding pins and registered resources the part that deals with reading the Q-Bus data/address has been moved to a second CPLD.
Main CPLD
The main CPLD is an ATF1508. It is very similar to the CPLD used on the first RLV12 Emulators except that it does not have any receive data register. The rest is pretty much identical.
As we have two CPLDs there are a few (in fact only 2) signals running between
them. The first signal is CSRADDR which is created by the receive CPLD and
signals that the a device register is being accessed.
The second signal LD is created by the DMA state machine of the main CPLD and
latches the DMA Read data into the DMA Read Register in the receive CPLD.
I have removed the CSR base register from the CPLD which results in a simpler bus interface logic and also avoids the conflict between the MCU updating the CSR and the PDP-11 reading the CSR. The downside is that the MCU is now interupted for every read access of the CSR even when the controller has set the busy bit. However the performance impact first only shows when the PDP-11 does polled IO.
The DMA state machine has changed slightly but works pretty much the same except it now signals the MCU when the DMA has finished and no longer signals the MCU that a data transfer is necessary. The handshaking using DMG is now used to let the MCU know when the DMA has finished.
Update 2020-10-18 RPLY for IACK cycles now waits for the MCU to finish the interrupt acknowledgement processing which is handled by an interrupt (INT2) service route in the MCU.
Name QBUS RLV12 Version 2 ;
PartNo A ;
Date 11.11.2019 ;
Revision 02 ;
Designer cbscpe ;
Company PRIVAT ;
Assembly None ;
Location ATHOME ;
Device f1508ispplcc84 ;
PIN 16 = TDAL15;
PIN 15 = TDAL14;
PIN 24 = TDAL13;
PIN 22 = TDAL12;
PIN 18 = TDAL11;
PIN 20 = TDAL10;
PIN 12 = TDAL9;
PIN 17 = TDAL8;
PIN 21 = TDAL7;
PIN 25 = TDAL6;
PIN 27 = TDAL5;
PIN 28 = TDAL4;
PIN 34 = TDAL3;
PIN 35 = TDAL2;
PIN 36 = TDAL1;
PIN 37 = TDAL0;
PIN 58 = TDAL16;
PIN 60 = TDAL17;
PIN 29 = TDAL18;
PIN 30 = TDAL19;
PIN 31 = TDAL20;
PIN 33 = TDAL21;
PIN 61 = RRPLY;
PIN 57 = RDIN;
PIN 55 = RDOUT;
PIN 56 = RWTBT;
PIN 54 = RSYNC;
PIN 1 = RINIT;
PIN 52 = TRPLY;
PIN 46 = TDIN;
PIN 48 = TDOUT;
PIN 50 = TWTBT;
PIN 51 = TSYNC;
PIN 49 = RIAKI;
PIN 41 = TIAKO;
PIN 44 = TDMR;
PIN 45 = RDMGI;
PIN 39 = TDMGO;
PIN 40 = TSACK;
PIN 81 = WRQ; /* Dedicated Load for Q-Bus Data Reg. */
PIN 83 = CLK;
PIN 2 = WRD; /* Dedicated Load for DMA Data Reg. */
PIN 80 = WRA; /* Dedicated Load for DMA Address Reg. */
PIN 74 = AD0;
PIN 73 = AD1;
PIN 75 = AD2;
PIN 68 = AD3;
PIN 69 = AD4;
PIN 76 = AD5;
PIN 70 = AD6;
PIN 67 = AD7;
PIN 8 = IRQST;
PIN 79 = DMR;
PIN 5 = DMG;
PIN 4 = INT0;
PIN 6 = INT1;
PIN 77 = INT2;
PIN 64 = IACK;
PIN 63 = ABORT;
PIN 10 = CSRADDR;
PIN 11 = LD; /* Load Q-Bus to DMA Data Reg. CPLD B*/
/*
!!!!!!!!! This CPLD requires the interface '21' in the MCU firmware
!!!!!!!!! #define rlv12 21 ; Select Assembler Option
*/
PROPERTY ATMEL {preassign KEEP};
PINNODE = [Q15..0] ; /* Data Output Register */
PINNODE = [D15..0] ; /* DMA Data Register */
PINNODE = [A21..1] ; /* DMA Address */
PINNODE = [T7..0] ; /* Temp Register for 16-bit writes */
PINNODE = CSR ; /* */
PINNODE = [DMA4..0] ; /* DMA State Machine */
PINNODE = SYNC ; /* */
PINNODE = DMGI ; /* */
PINNODE = SACK ; /* */
PINNODE = DATA ; /* */
PINNODE = RPLY ; /* */
PINNODE = DMARW ; /* Control bit: DMA read(1) or DMA write(0) */
PINNODE = BUSEN ; /* */
PINNODE = DIRQ ; /* Device Interrupt Request */
PINNODE = DACK ; /* Device Interrupt Acknowledge */
PINNODE = RECI ; /* */
PINNODE = [RS1..0];
/*
Define one of the possible emulations: RLV12, RH70
*/
$DEFINE RLV12
/*
Field definitions
*/
FIELD RS = [RS1..0]; /* Register Select Address for Atmega1281 reads/writes */
FIELD DMA = [DMA4..0]; /* DMA State Machine */
/*
Register Select for DMA Address Registers
*/
RS.ar = ABORT;
RS.ck = !WRA;
RS0.t = 'b'1;
RS1.t = RS0;
CSR.ck = RSYNC;
CSR.d = CSRADDR;
/*
The device registers are effectively implemented within the MCU.
When the PDP-11 accesses a device register the MCU is interrupted
and must either read the value from the Q-Bus (DATO/DATOB) or
write the requested register content to the Q-Bus data register.
At the same time the MCU must perform all processing that must be
performed immediately. When the MCU has finished processing the
device register IO it has to acknowledge the interrupt using the
IACK signal (i.e. create a short pulse on IACK). The CPLD will then
assert RPLY to signal the PDP-11 to proceed. Note that all processing
of the MCU must be done within the Q-bus-timeout, which is about 10usec.
DATI to a device register triggers INT1 interrupt of the MCU.
*/
INT1.d = !(!RWTBT & CSRADDR);
INT1.ck = RSYNC;
INT1.ap = IACK;
/*
DATO/DATOB to a device register triggers INT0 interrupt of the MCU.
*/
INT0.d = !(RWTBT & CSRADDR);
INT0.ck = RSYNC;
INT0.ap = IACK;
TRPLY = CSR & RSYNC & INT1 & RDIN /* Assert RPLY when MCU is done */
# CSR & RSYNC & INT0 & RDOUT; /* Assert RPLY when MCU is done */
/*
The interrupt logic is now fully handled in software so we can also
update any register if needed. The CPU sets IRQST whenever an interrupt is
required. This asserts !BIRQ on the QBUS. The PDP-11 will then perform an
interrupt acknowledge cycle. That is it will assert BDIN without asserting
BSYNC previously. This is because BDIN is used by all devices to freeze the
interrupt request status in an internal register. After BDIN the PDP-11
will assert BIAKO of the CPU board. BIAKO of each slot is connected to
BIAKI of the next slot building a daisy chain. Each device needs to
monitor BIAKI and in case it is not requesting the interrupt it must
assert BIAKO. This decision is made by every card at the same time
using the latched interrupt request status (DACK). The first device
with DACK being asserted must not assert BIAKO but instead must place
the interrupt vector onto the bus and assert BRPLY and de-assert
the interrupt request. The PDP-11 will then read the vector from
the bus and de-assert BIAKO and BDIN and the device must remove the
vector data from the bus.
If BIAKI is asserted and we have requested an interrupt this now triggers
INT2 interrupt of the MCU. The MCU must then de-assert IRQST and assert
the interrupt using IACK. At the same time it can do some post interrupt
processing. E.g. the IE of the CSR of a RH70 is automatically cleared
when an interrupt is acknowledged. This could also be used to implement
a programmable interrupt vector.
In the case of the RLV12 the MCU only needs to clear the IRQST signal
and acknowledge the interrupt using IACK.
*/
DACK.d = IRQST;
DACK.ck = RDIN;
DACK.ar = RINIT;
TIAKO = RIAKI & !DACK;
/*TIRQ = IRQST;*/
INT2.d = !DACK;
INT2.ck = RIAKI;
INT2.ap = IACK;
APPEND
TRPLY = RIAKI & RDIN & DACK & INT2;
/*
DMA Data Register
*/
[D7..0].d = [AD7..0];
[D15..8].d = [D7..0];
[D15..0].ck = WRD;
/*
Q-Bus Data Register
*/
[Q7..0].d = [AD7..0];
[Q15..8].d = [Q7..0];
[Q15..0].ck = WRQ;
/*
DMA Address
*/
DMARW.ar = WRA & RS:['d'0] & !AD0;
DMARW.ap = WRA & RS:['d'0] & AD0;
DMARW.ck = 'b'0;
DMARW.d = 'b'0;
[A7..1].ar = WRA & RS:['d'0] & ![AD7..1];
[A7..1].ap = WRA & RS:['d'0] & [AD7..1];
[A15..8].ar = WRA & RS:['d'1] & ![AD7..0];
[A15..8].ap = WRA & RS:['d'1] & [AD7..0];
[A21..16].ar = WRA & RS:['d'2] & ![AD5..0];
[A21..16].ap = WRA & RS:['d'2] & [AD5..0];
/*
Synchronous counter for DMA address which is updated after every DMA
cycle. The address is incremented whenever a DMA cycle has finished.
*/
[A21..1].ck = !DMR;
A1.t = 'b'1;
A2.t = A1;
A3.t = A1 & A2;
A4.t = A1 & A2 & A3;
A5.t = A1 & A2 & A3 & A4;
A6.t = A1 & A2 & A3 & A4 & A5;
A7.t = A1 & A2 & A3 & A4 & A5 & A6;
A8.t = A1 & A2 & A3 & A4 & A5 & A6 & A7;
A9.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8;
A10.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9;
A11.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10;
A12.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11;
A13.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12;
A14.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13;
A15.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14;
A16.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14 & A15;
A17.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14 & A15 & A16;
A18.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14 & A15 & A16 & A17;
A19.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14 & A15 & A16 & A17 & A18;
A20.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14 & A15 & A16 & A17 & A18 & A19;
A21.t = A1 & A2 & A3 & A4 & A5 & A6 & A7 & A8 & A9 & A10 & A11 & A12 & A13 & A14 & A15 & A16 & A17 & A18 & A19 & A20;
/*
Q-Bus Output Select and Output Enable
DMA4 DMA Read is active
DMA3 DMA is active
DMA2 DMA data transfer
*/
[TDAL15..0] = !RIAKI & DMA3 & !DMA2 & [A15..1, 'b'0]
# !RIAKI & !DMA4 & DMA3 & DMA2 & [D15..0]
# !RIAKI & !DMA3 & CSR & RDIN & [Q15..0]
$IFDEF RLV12
# RIAKI & DACK & RDIN & 'o'160;
$ENDIF
$IFDEF RH70
# RIAKI & DACK & RDIN & 'o'254;
$ENDIF
/*
The upper address bits are just a copy of the DMA address.
*/
[TDAL21..16] = [A21..16] & DMA3 & !DMA2;
/*
The rising edge of DMR from the MCU triggers BDMR of the Q-Bus when
the DMA is granted BDMR is cleared but DMR will be kept asserted by
the MCU until the MCU has finished the DMA. Used to control the state
machine.
*/
TDMR.d = 'b'1;
TDMR.ck = DMR;
TDMR.ar = DMA3 # RINIT # ABORT;
TSYNC.ck = CLK;
TDOUT.ck = CLK;
TDIN.ck = CLK;
/*
Synchronous Signals
*/
DMGI.ck = CLK;
DMA.ck = CLK;
RPLY.ck = CLK;
DMG.ck = CLK;
LD.ck = CLK;
DMA.ar = RINIT # ABORT;
/*
Latched BDMGI and BRPLY as we need a stable DMGI and RPLY for the state machine
*/
DMGI.d = RDMGI;
RPLY.d = RRPLY;
/*
For DMA writes the MCU must first load the DMA data register. Then it
sets DMR which asserts BDMR. Then eventually the statemachine proceeds
to state 'h'8 places the DMA address, asserts TSYNC, asserts TDOUT and
waits for RPLY and then finishes the cycle.
For DMA reads the MCU just sets DMR which asserts BDMR. The state
machine proceeeds to stae 'h'18, places the DMA address, asserts
TSYNC, asserts TDIN and waits for RPLY and then finishes the cycle.
After that the MCU can read the DMA data register.
*/
sequence DMA {
PRESENT 'h'00 IF !DMGI NEXT 'h'00;
IF DMGI NEXT 'h'01;
PRESENT 'h'01 IF !DMR NEXT 'h'02;
IF DMR NEXT 'h'03;
PRESENT 'h'02 IF !DMGI NEXT 'h'00;
IF DMGI OUT TDMGO; NEXT 'h'02;
PRESENT 'h'03 IF !DMARW NEXT 'h'08;
IF DMARW NEXT 'h'18;
/*
DMG
At the end of the DMA cycle the state machine asserts DMG to let the MCU
know that the DMA has ended. The MCU then must de-assert DMR before it can
start another DMA. This is placed to a state with TSACK de-asserted to
release the bus while we are waiting for the MCU.
*/
PRESENT 'h'04 IF DMR NEXT 'h'04 OUT DMG;
IF !DMR NEXT 'h'00;
/*
Write
*/
PRESENT 'h'08 NEXT 'h'09;
PRESENT 'h'09 NEXT 'h'0A OUT TSYNC;
PRESENT 'h'0A NEXT 'h'0B OUT TSYNC;
PRESENT 'h'0B NEXT 'h'0C OUT TSYNC OUT TDOUT;
PRESENT 'h'0C IF !RPLY NEXT 'h'0C OUT TSYNC OUT TDOUT;
IF RPLY NEXT 'h'0D OUT TSYNC OUT TDOUT;
PRESENT 'h'0D NEXT 'h'0E OUT TSYNC OUT TDOUT;
PRESENT 'h'0E IF RPLY NEXT 'h'0E OUT TSYNC;
IF !RPLY NEXT 'h'0F;
PRESENT 'h'0F NEXT 'h'04 OUT DMG;
/*
Read
*/
PRESENT 'h'18 NEXT 'h'19;
PRESENT 'h'19 NEXT 'h'1A OUT TSYNC;
PRESENT 'h'1A NEXT 'h'1B OUT TSYNC;
PRESENT 'h'1B NEXT 'h'1C OUT TSYNC OUT TDIN OUT LD;
PRESENT 'h'1C IF !RPLY NEXT 'h'1C OUT TSYNC OUT TDIN OUT LD;
IF RPLY NEXT 'h'1D OUT TSYNC OUT TDIN OUT LD;
PRESENT 'h'1D NEXT 'h'1E OUT TSYNC OUT TDIN OUT LD;
PRESENT 'h'1E IF RPLY NEXT 'h'1E OUT TSYNC;
IF !RPLY NEXT 'h'1F;
PRESENT 'h'1F NEXT 'h'04 OUT DMG;
}
TSACK = DMA3;
TWTBT = !DMA4 & DMA3 & !DMA2;
Second CPLD
The logic of the second CPLD is rather simple and there are not many comments. The
only speciality is the internal register select register which can be loaded with
any register address and at the same time implements a read sequence. So when you
first have to read the device register address and then the Q-Bus for DATO/DATOB
cycle it is sufficient to load the register select with address zero and then
read three bytes. The same is true for the DMA Read data register. You first load
the register address one and then perform two reads to retrieve the low and the
high byte.
The ATF1504 deals primarily with the receive side of the address/data bus and implements the following functions.
First it latches the lower address bits that identify the device register
being selected. It also generates the CSRADDR signal to inform the main
CPLD that a device register is being addressed.
PINNODE = [C5..0] ; /* CSR Address */
FIELD ADDR = [C5..0]; /* Latched address used for register address */
FIELD RS = [RS2..0]; /* Register Select Address for Atmega1281 reads/writes */
FIELD IOADDR = [RDAL12..0]; /* Access to IO Page only requires address lines 0..12 */
/*
Device Address is also generated by this CPLD as only we see the address
*/
ADDR.d = [RDAL5..0];
ADDR.ck = RSYNC;
/*
CSR Select must be generated in this CPLD as we are the only CPLD that receives
the DAL status from the BUS
*/
CSRADDR = RBS7 & IOADDR:['o'174400..174417];
The DMA Read Data Register. Remember this CPLD is the only one that can read data
from the Q-Bus. Therefore there is a DMA Read Data register that latches the
data from the Q-Bus during DMA Read. The LD signal is created by the DMA
statemachine of the main CPLD.
[Q15..0].l = [RDAL15..0];
[Q15..0].le = LD;
MCU Interface Control Interface is implemented as a register select address and a state machine. The MCU can address the five readable register individually. But it can also access them sequentially. There are two sequences typically required. The first is the sequence is used for DATO/DATOB cycles
- Device Register Address
- Q-Bus data low byte
- Q-Bus data high byte
and the second sequence is used to read the DMA Read data register
- DMA Read data low byte
- DMA Read data high byte
Adding a statemachine to the register select address increases the performance of the interface between the CPLD and the MCU. The MCU has no external memory interface which would make all this obsolete. But there is no high-speed AVR processor (≥20MHz) with enough RAM (≥8kbyte)
RS.ar = ![AD2..0].io & ALE & !RD;
RS.ap = [AD2..0].io & ALE & !RD;
RS.ce = RD;
RS.ck = ALE;
sequence RS {
present 'd'0 next 'd'2;
present 'd'1 next 'd'3;
present 'd'2 next 'd'4;
present 'd'3 next 'd'5;
present 'd'4 next 'd'0;
present 'd'5 next 'd'0;
}
The MCU Data Interface provides 5 registers the MCU can read. Note how the device address register encodes which byte is being read and how the address bits are shuffled to make the lower 5 bits a direct index into a AVR MCU jump table without the need to shift bits. In addition the two signals UB and LB that inform the MCU whether the upper or lower byte are written by a DATO/DATOB cycle are now inverted. This reduces the number of product terms requried for AD6 and AD7 by the optimization algorithm of WinCUPL.
The other four registers are used to read the Q-Bus and the DMA Read data register.
UB = !RWTBT
# RWTBT & C0;
LB = !RWTBT
# RWTBT & !C0;
[AD7..0] = RS:['d'2] & [RDAL7..0].io
# RS:['d'4] & [RDAL15..8].io
# RS:['d'1] & [Q7..0]
# RS:['d'3] & [Q15..8]
# RS:['d'0] & [!UB, !LB, C0, C5, C4, C3, C2, C1];
[AD7..0].oe = RD;
The following is the complete CPLD design file of the second CPLD. Separating
the receive data bus form the rest of the logic provides a very efficient
usage of CPLD pins. The number of available pins has always been an issue in
many of my projects. The only common input signals of the two CPLDs are
RWTBT and RSYNC and the only signals that run between the two CPLDs are
CSRADDR and LD.
Name QBUS RLV12 Version 2 ;
PartNo B ;
Date 24.09.2019 ;
Revision 02 ;
Designer cbscpe ;
Company PRIVAT ;
Assembly None ;
Location ATHOME ;
Device f1504ispplcc44 ;
/*
Second CPLD which only performs read of the data bus there are 5 registers
that can be read
Device Address This is a copy of A1..5 latched with each SYNC together
with two bits, UB and LB, that combine WTBT with A0 which
are reset if the respective byte should be updated
for DATOB cycles. They are reset for DATO cycles
Q-Bus Data These two register provide the current status of the
lower 16-bits of the multiplexed address/data bus and
are used to read the data in a DATO/DATOB cycle
DMA Data This 16-bit register will store the data of a DMA read
cycle
You can read the registers sequentially
Device Address(0) -> Q-Bus Low(2) -> Q-Bus High(4)
and
DMA Data Low(1) -> DMA Data High(3)
When RD is reset then ALE just loads the register select. If RD is high ALE
selects the next register in sequence. So typically you only need to set
the register select either to 0x00 or 0x01 and then you can just select the
next register by creating a pulse on ALE.
When RD is set then the output of the AD multiplexor is enabled and you can
read the content of the selected register.
2018-12-08
- Remove CS1ADDR no longer required after we removed CSR from CPDL A
!!!!!!!!! This CPLD requires the interface '21' in the MCU firmware
!!!!!!!!! #define rlv12 21 ; Select Assembler Option
*/
PIN 28 = RDAL0;
PIN 27 = RDAL1;
PIN 26 = RDAL2;
PIN 25 = RDAL3;
PIN 24 = RDAL4;
PIN 21 = RDAL5;
PIN 19 = RDAL6;
PIN 20 = RDAL7;
PIN 18 = RDAL8;
PIN 17 = RDAL9;
PIN 16 = RDAL10;
PIN 14 = RDAL11;
PIN 12 = RDAL12;
PIN 11 = RDAL13;
PIN 9 = RDAL14;
PIN 8 = RDAL15;
PIN 6 = AD0;
PIN 5 = AD1;
PIN 4 = AD2;
PIN 39 = AD3;
PIN 40 = AD4;
PIN 34 = AD5;
PIN 37 = AD6;
PIN 36 = AD7;
PIN 41 = RSYNC;
PIN 33 = RWTBT;
PIN 1 = RBS7;
PIN 29 = CSRADDR;
PIN 43 = LD;
PIN 44 = RD;
PIN 2 = ALE;
PROPERTY ATMEL {preassign=KEEP};
PROPERTY ATMEL {CASCADE_LOGIC=ON};
PROPERTY SOFT_BUFFER {UB, LB};
PINNODE = [Q15..0];
PINNODE = [RS2..0];
PINNODE = [C9..0] ; /* CSR Address */
FIELD ADDR = [C9..0]; /* Latched address used for register address */
FIELD RS = [RS2..0]; /* Register Select Address for Atmega1281 reads/writes */
FIELD IOADDR = [RDAL12..0]; /* Access to IO Page only requires address lines 0..12 */
/*
Device Address is also generated by this CPLD as only we see the address
*/
ADDR.d = [RDAL9..0];
ADDR.ck = RSYNC;
/*
CSR Select must be generated in this CPLD as we are the only CPLD that receives
the DAL status from the BUS
*/
CSRADDR = RBS7 & IOADDR:['o'174400..174417];
/*
DMA Data Register for DMA reads
*/
[Q15..0].l = [RDAL15..0];
[Q15..0].le = LD;
/*
Register Select we support two sequences
0->2->4 to read the Device Address, followed by the Q-Bus
1->3->5 to read the DMA data register (5 is not used)
*/
RS.ar = ![AD2..0].io & ALE & !RD;
RS.ap = [AD2..0].io & ALE & !RD;
RS.ce = RD;
RS.ck = ALE;
sequence RS {
present 'd'0 next 'd'2;
present 'd'1 next 'd'3;
present 'd'2 next 'd'4;
present 'd'3 next 'd'5;
present 'd'4 next 'd'0;
present 'd'5 next 'd'0;
}
UB = !C9 & !RWTBT
# !C9 & RWTBT & C0
# C9 & !C8;
LB = !C9 & !RWTBT
# !C9 & RWTBT & !C0
# C9 & !C7;
[AD7..0] = RS:['d'2] & [RDAL7..0].io
# RS:['d'4] & [RDAL15..8].io
# RS:['d'1] & [Q7..0]
# RS:['d'3] & [Q15..8]
# RS:['d'0] & [!UB, !LB, C6, C5, C4, C3, C2, C1];
[AD7..0].oe = RD;
When placing signals ot the PINs you need to pay special attention to the
RD and the ALEsignal so they are using one of the global output enable
or clock signals. By using a global output enable input for RD the output
enable term is not using a macro-cell product-term so a single macro-cell
can be used as a 5-to-1 multiplexor, perfect for the 5 byte registers to read.
The second important point is that ALE is using one of the global clock inputs
because only then you can use the clock enable input of a macro-cell.
MCU Firmware
The MCU Firmware is the same for all RLV12 Emulator versions. There is now an assembler option to select the appropriate hardware. So all Emulators provide the same features.